
Fabriquer un quadricoptère
Un quadricoptère est un objet volant composé de 4 moteurs munis d'hélices, disposés aux 4 extrémités d'une croix en métal, ou autre matériau, le composite carbone étant le nec plus ultra (meilleur compromis poids/rigidité).
Chaque moteur est relié à un variateur de vitesse, les 4 variateurs étant pilotés par une carte de commande, qui reçoit ses ordres d'un récepteur de radiocommande
Le but de cet article est de construire un quadricoptère facile à piloter, mais résistant à des atterrissages un peu brutaux, inévitables en phase d'apprentissage de pilotage. Il sera donc un peu lourd mais solide.
Le temps de vol en pratique est d'environ 9 minutes avec un accumulateur LiPo 3S de 2.2Ah.
Les spécifications retenues sont:
- envergure : 68cm (diagonale)
- poids avec batterie : 1.2kg
- vol en mode X (soit 2 bras en avant) car avec un appareil photo ou vidéo en emport, la visibilité est meilleure.
Composition
Le quadricoptère se compose de :
- 1 chassis (support de cartes, batterie, accessoires...)
-fabrication personnelle en dural
- 4 bras (supports des moteurs, train,...)
-fabrication personnelle en dural et epoxy
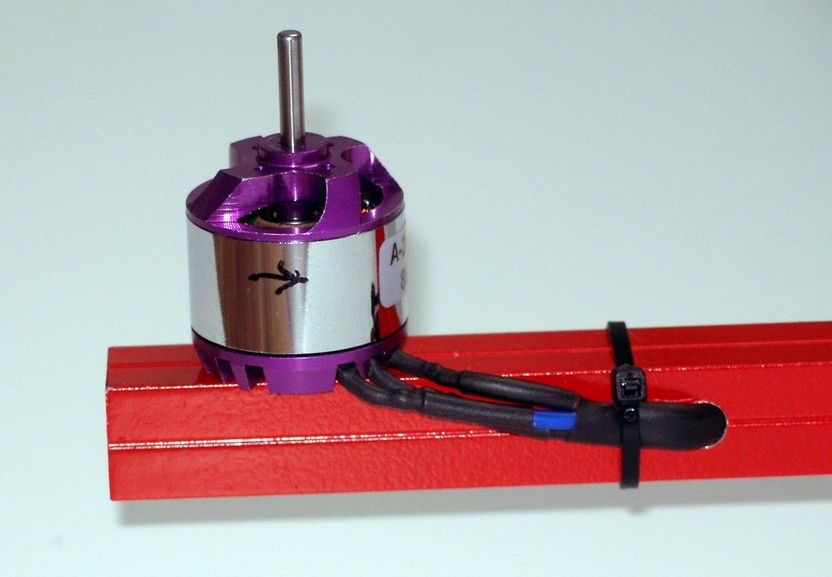
- 4 moteurs brushless 12V, de poussée adaptée au poids de l'appareil
-Ref AC2830-358, 850Kv (17.40€)
- 4 hélices plastique 10x4.5 : 2 dans chaque sens
-Hélice 10x4.5 Sens horaire CW 1045 (1.69€)
-Hélice 10x4.5 Anti-horaire CCW 1045 (1.69€) ici
-Remarque : pour débutant, commander 10 hélices de chaque sens minimum...
- 1 récepteur de radiocommande 2.4GHz 8 canaux
-Recepteur FrSky V8FR-II-HV 8CH – 2.4Ghz (29€) ici
- 1 carte de commande, pilotée par le récepteur, qui envoie ses ordres aux variateurs de vitesse
- ArduPilot Mega APM 2.5 DIYDRONES (195€) ici
- 4 variateurs de vitesse (ou ESC's) qui pilotent les moteurs en triphasé
-ArduCopter ESC 20 Amp (17,40€) ici
- 1 émetteur de radiocommande 2.4GHz 9 canaux sans module, firmware V2
-TURNIGY TGY 9X (42€) ici
- 1 module émission
-FrSky DJT 2.4Gh (30€) ici
- 1 batterie LiPo 3S 11.1V 2,2 à 2.6 h, décharge >30C
-LIPO Hyperion G3 VX - 11,1V 3S 2600mAh 35C/5C (47.90€) à longue durée de vie ici
-ou Zippy 2100maH 3S1P 35C (25€) ici
- 1 chargeur automatique pour Lipo
-HKC6 Hobbyking (32.90€) ici
- 1 Alarme Buzzer modèle perdu (4.50€) ici
- 1 avertisseur batterie faible (à fabriquer)
Il est important de ne pas trop décharger une batterie LiPo sous peine de diminuer sa durée de vie. Le niveau bas pour une 3S doit être>10.2V.
Contrairement aux idées reçues, il est possible, moyennant quelques précautions, de paralléliser des batteries LiPo identiques.
- Cables divers de connexion
La carte de commande APM 2.5
Cette carte intègre :
- un Atmega2560
- un Atmega32-U2 comme programmateur série USB (Arduino Compatible) et encodeur PPM
- capteurs intégrés (Invensense 6DoF MPU-6000 ) dont gyromètres, accéléromètres, capteur de pression (altimètre), magnétomètre, mini-USB pour paramétrages avec un PC, GPS 10Hz MT3329 Mediatek, une carte mini-SD avec mémoire dataflash,.
- 12 entrées/sorties analogiques
- 8 sorties PWM
- update par le port USB
Des extensions sont disponibles pour ajouter par exemple un sonar, qui permet de maintenir l'altitude à 20cm près, un capteur de défilement optique, un support pour appareil photo avec déclenchement télécommandé, etc...
Voici une vue de la carte APM 2.5 (Ardupilot Mega APM 2.5):

L'APM 2.5 permet de commander en temps réel 10 modes de vol différents, dont un vol stabilisé simple, un vol à hauteur fixe, un retour automatique à la base de départ , un mode acrobatie (commutation par inverseurs sur la radiocommande).
De ce fait, un débutant en télécommande peut se lancer sans trop de risques (sauf quelques atterrissages malencontreux au début, et quelques hélices cassées...).
Du fait de la disparité de puissance et de dimensions des machines pouvant être pilotées par une telle carte, il est nécessaire de pouvoir paramétrer un certain nombre de variables du programme de pilotage intégré, basé sur des correcteurs PID, dont voici un synoptique :
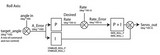
Un correcteur est un algorithme de calcul qui délivre un signal de commande à partir de la différence entre la consigne et la mesure.
Le correcteur PID agit de 3 manières :
action Proportionnelle : l'erreur est multipliée par un gain G
action Intégrale : l'erreur est intégrée et divisée par un gain Ti
action Dérivée : l'erreur est dérivée et multipliée par un gain Td
Pour plus d'information sur ces correcteurs, voir : http://fr.wikipedia.org/wiki/R%C3%A9gulateur_PID
Les variables se paramètrent par l'intermédiaire d'un logiciel spécifique appelé APM Mission Planer, qui permet de télécharger le firmware spécifique au quad, de le paramétrer, et de planifier des missions (en rentrant des coordonnées GPS que le quad suivra en mode automatique).
On peut également analyser les paramètres après un vol (log).
La difficulté peut venir du fait que ce logiciel est en anglais, ainsi que le forum qui lui est associé http://diydrones.com/forum/categories/arducopter-2-x-multicopter/listForCategory
L'Emetteur de radiocommande TURNIGY TGY 9X

Cet émetteur bas prix (acheté sur le site Leboncoin.fr) est malheureusement doté d'un firmware très limité.
Il existe un autre firmware « ER9x » qui permet d'atteindre les mêmes performances que des appareils beaucoup plus chers.
Il faut pour cela reflasher le firmware.
Voir le site http://code.google.com/p/er9x/
Utiliser la version ER9x avec chip ATMEGA 64A.
Ceci nécessite un programmateur AVRisp ISP10 par exemple (installer le pilote et l'éxécutable).
L'éxécutable est « eXtreme Burner – AVR 1.3 Beta Test »
http://extremeelectronics.co.in/software/extreme-burner-avr-1-3-beta-test/
Il faut cabler une prise de programmation dans l'émetteur.
Voir les explications ici: http://www.freedomheli.net/topic2719-radio-turnigy-tgy-9x-firmware-er9x-module-dsm2-spektrum.html
Il faut installer le module d'émission FrSky DJT 2.4Gh à l'arrière de l'émetteur, dans le logement prévu à cet effet, ce qui nécessite également une intervention dans le boitier (support du connecteur).
La commutation de 6 modes de vol se fait avec les inverseurs AUX3 (3 pos) et AIL D/R.
Il faut programmer le mode MIXER avec les paramètres suivants :
CH5 59% HALF ID0
CH5 +9% HALF ID1
CH5 -41% HALF ID2
CH5 -26% HALF AIL
CH7 100% FULL TRN
Pour les autres voies :
CH1 -100% AIL roulis
CH2 100% ELE tangage
CH3 100% THR moteurs
CH4 100% RUD dérive
Réalisation

Moyennant quelques matériaux disponibles dans les grandes surfaces bricolage, il est assez simple de réaliser son quadricoptère.
Bien sur, on peut aussi se procurer une structure(frame) toute faite et pliable éventuellement.
Voici par exemple un modèle pliable en carbone pour 136€...
http://www.goodluckbuy.com/hobbylord-bumblebee-carbon-firber-folding-frame-quadcopter-500mm-shaft-distance.html?¤cy=eur
Mais il est plus satisfaisant de le faire soi-même si l'on est bricoleur.
Le matériel nécessaire est basique :
- une perceuse électrique avec une boite de forêts métal
- une scie à métaux
- un étau
- une scie sauteuse avec des lames pour métaux tendres
- des limes, des tournevis
- un fer à souder
Les matériaux à se procurer sont :
- une boite de CD vide avec couvercle de 5cm de hauteur
- une plaque de dural de 1.5mm d'épaisseur, pour découper un rond de 14cm de diamètre
- une plaque de circuit imprimé époxy de 1.5mm d'épaisseur, pour découper un rond de 14cm de diamètre, et qui, dans la photo ci-dessous ,intègre un régulateur +5V pour l'alimentation de la carte de commande et du récepteur. Ce régulateur extérieur est fortement conseillé, car celui qui est intégré dans les variateurs de vitesse (BEC) est fortement parasité.
- 2m de tube alu carré de 15mm et 4 obturateurs plastiques de la même section
- 25cm de tube alu de 6mm ext pour les entretoises des pieds (version train 1)
- 1m de tube epoxy de 6mm (si version train 2 : plus fragile mais plus léger)
- de la visserie acier de 3mm avec écroux autobloquants
- de la visserie nylon en 3mm et entretoises
Voici quelques étapes de la construction en photos.

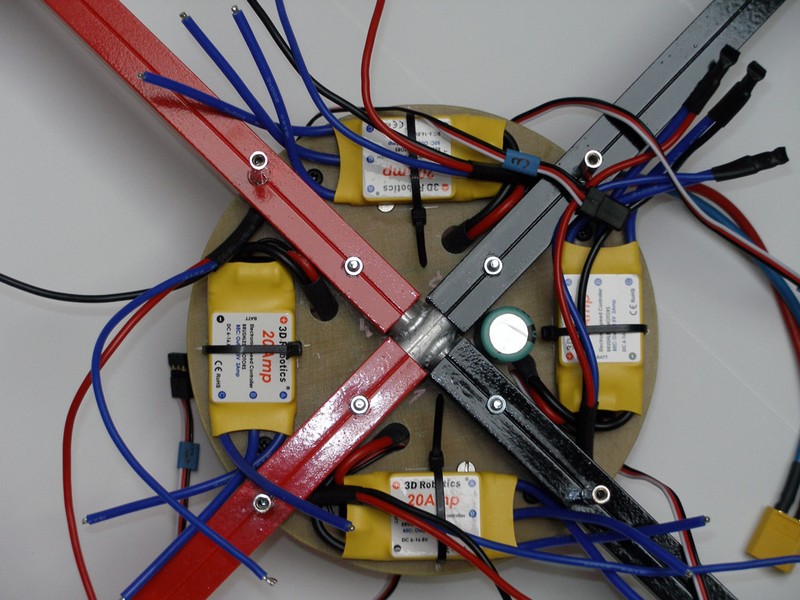
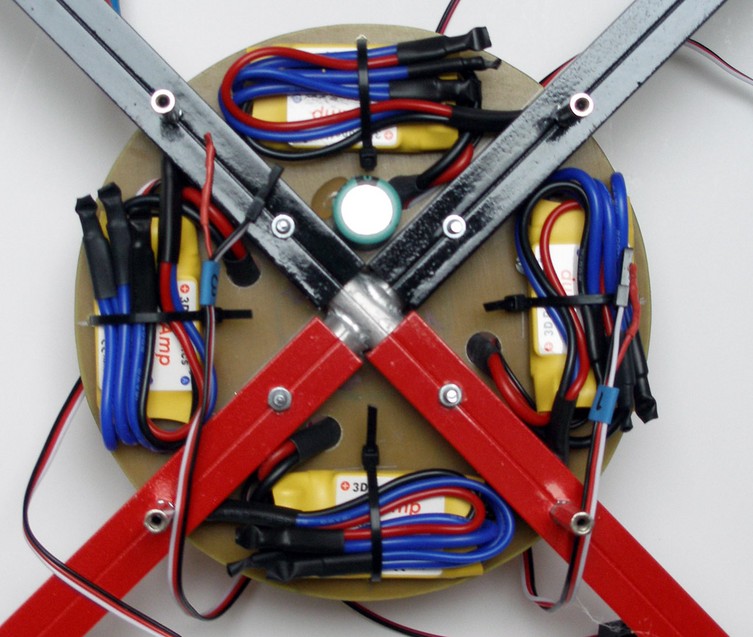




Pour la connexion de la batterie aux 4 contrôleurs de vitesse, il est recommandé d'utiliser une platine de connexion comme celle ci-contre.
Voir http://www.goodluckbuy.com/multicopter-multi-tri-copter-power-battery-to-8-esc-connection-board.html
Si la structure doit être peinte, plonger les tubes dans de la soude caustique pour enlever la couche d'alumine et dégraisser. Rincer à l'eau claire
abondamment. Sécher. Ne pas y poser les doigts, une fois propres.
- Passer un primaire pour alu/PVC au pinceau. Laisser sécher 24h.
- Peindre les tubes et les pieds à la bombe rouge pour les tubes avant, noir pour les tubes arrières.
Guide de réglage
Le manuel est ici : http://code.google.com/p/arducopter/wiki/PDF_Guides?wl=en
Les instructions ArduCopter pour la configuration sont ici : http://code.google.com/p/arducopter/wiki/APM2board
Les prérequis sont :
- installer le driver USB (Arduino Mega 2560.inf)
- installer Mission Planer last version
Pour l'optimisation des paramètres PID, voir le forum ici: http://diydrones.com/forum/topics/arducopter-tuning-guide
Il est très important de ne pas négliger cette dernière étape qui est primordiale pour la fonctionnalité et les performances du quad.
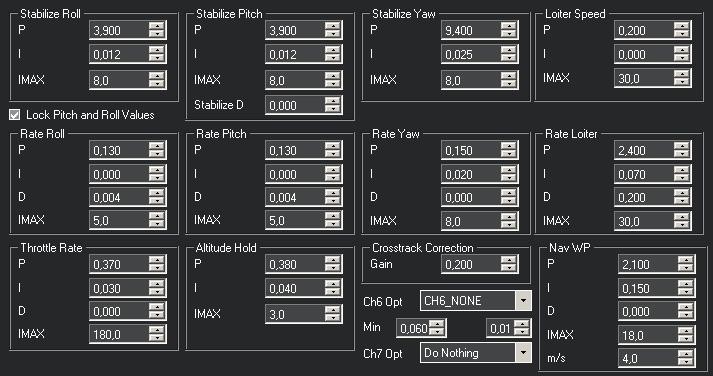
Le tableau des paramètres par défaut du firmware V8.1 est le suivant :

Après optimisation en vol, les paramètres retenus sont :
Failsafe
Le failsafe est une fonction de sécurité intégrée dans le récepteur: en cas de perte du signal de liaison (émetteur défaillant ou hors de portée), le récepteur envoie des ordres par défaut à la carte de commande.
Le plus simple est de programmer le failsafe sur le mode de vol RTL (Return To Launch), ce qui, en cas de problème, fera revenir le quad au point de départ avec atterrissage automatique.
Ceci se programme comme suit:
- émetteur en marche sur le mode de vol RTL
- mettre le récepteur sous tension
- presser le bouton F/S du récepteur brièvement
... et c'est terminé !
Il faut tout de même vérifier avec Mission Planer que le mode de vol commute bien sur RTL si l'on coupe l'émetteur.
Entrainement
Il est recommandé de débuter avec un petit modèle du commerce, que l'on peut acquérir à prix modéré chez divers fournisseurs.
En effet, la perte d'un modèle comme décrit ci-dessus est assez onéreuse (>400€).
Il y a plusieurs modèles faciles à piloter et très évolutifs, avec tonneaux et loopings faciles à éxécuter. Voir par exemple:
-Hubsan X4 V2 (avec ou sans retour vidéo) à moins de 50€ ici
-V929, V959, etc... ici
Récemment, DJI a commercialisé un modèle complet, le Phamtom3 Advanced, mais le cout est assez élevé (>1000€ en 2015) ici
Cet appareil intègre un GPS et une boussole (entre autres) pour une navigation aisée. Ses qualités de vol sont remarquables, et il n'y a qu'a le mettre sous tension pour voler...